
 +86 18068001229
+86 18068001229 








0102030405
ການທົບທວນຄືນກ່ຽວກັບໂທໂພໂລຊີ ແລະ ການນຳໃຊ້ການຄວບຄຸມຂອງໝໍ້ແປງເອເລັກໂຕຣນິກພະລັງງານແຮງດັນກາງ-ສູງ III
2025-09-18
3.3 ໂທໂພໂລຊີຫຼາຍລະດັບທີ່ຖືກບີບອັດ
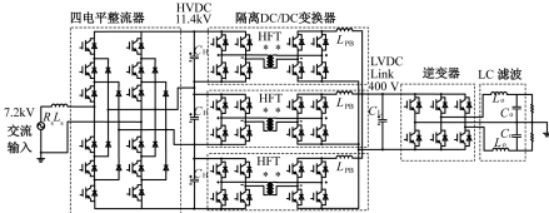
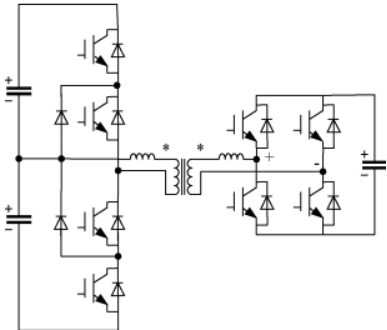
ສະແດງໃຫ້ເຫັນໂທໂພໂລຢີຫຼາຍລະດັບແບບ Neutral Point Clamped (NPC). ນອກເໜືອໄປຈາກໂທໂພໂລຢີ NPC ທີ່ຖືກຍຶດດ້ວຍ diode ແລ້ວ, ໂທໂພໂລຢີ NPC ຍັງປະກອບມີປະເພດຕົວເກັບປະຈຸໄຟຟ້າແບບບິນ ແລະ ປະເພດຍຶດປະສົມ, ແລະ ອື່ນໆ. ເຖິງຢ່າງໃດກໍ່ຕາມ, ເນື່ອງຈາກປະລິມານຕົວເກັບປະຈຸໄຟຟ້າທີ່ມີຂະໜາດໃຫຍ່, ໂທໂພໂລຢີ NPC ສ່ວນໃຫຍ່ຍັງໃຊ້ອຸປະກອນສະຫຼັບແບບ passive ຫຼື active ສຳລັບການຍຶດ. ຍົກຕົວຢ່າງໂທໂພໂລຢີຫຼາຍລະດັບແບບ diode-clamped, ໃນໂທໂພໂລຢີຂັ້ນຕອນ rectifier ສາມເຟສ, ແຕ່ລະຂາເຟສປະກອບດ້ວຍ transistors switching ແບບ cascades ແລະ diodes clamping, ເຊື່ອມຕໍ່ຂະໜານກັບລົດເມ DC ແຮງດັນສູງດຽວ. ເອກະສານໄດ້ສະເໜີໂທໂພໂລຢີ PET ເຟສດຽວທີ່ມີຂັ້ນຕອນ rectifier ໂດຍໃຊ້ວົງຈອນທີ່ຍຶດດ້ວຍ diode ສີ່ລະດັບ. ລົດເມ DC ແຮງດັນສູງດຽວແມ່ນຕິດຕາມດ້ວຍ DABs ຂາເຂົ້າ-ຊຸດ-ຂາອອກຂະໜານ, ດັ່ງທີ່ສະແດງ. ໂທໂພໂລຢີນີ້ສາມາດຂະຫຍາຍໄປສູ່ໂຄງສ້າງສາມເຟສ, ແລະ ຈຳນວນລະດັບແຮງດັນສາມາດປ່ຽນແປງໄດ້ໂດຍອີງໃສ່ລະດັບແຮງດັນທີ່ອຸປະກອນທົນທານຕໍ່ ແລະ ລະດັບແຮງດັນຂ້າງແຮງດັນສູງ. ເຊັ່ນດຽວກັນກັບໂທໂພໂລຢີ MMC, ໂທໂພໂລຢີ NPC ຍັງສາມາດນຳໃຊ້ໃນຂັ້ນຕອນການໂດດດ່ຽວ, ເຊື່ອມຕໍ່ລົດເມ DC ແຮງດັນສູງກັບ ໝໍ້ແປງໄຟຟ້າແບບແຍກ, ດັ່ງທີ່ສະແດງໃຫ້ເຫັນ. ເອກະສານໄດ້ນຳໃຊ້ຕົວແປງ NPC ທີ່ມີໄດໂອດຍຶດສາມລະດັບໃສ່ດ້ານແຮງດັນສູງຂອງຕົວແປງສະທ້ອນ LLC, ໂດຍການກວດສອບມັນຢູ່ໃນຕົ້ນແບບ 166kW/2kV~400V. ເອກະສານໄດ້ນຳໃຊ້ວົງຈອນ NPC ທີ່ມີໄດໂອດຍຶດສາມລະດັບໃສ່ DAB ສາມເຟສ, ເຊິ່ງບັນລຸລັກສະນະແຮງດັນ ແລະ ກະແສໄຟຟ້າ DAB ທີ່ເໝາະສົມ.
ເມື່ອໂທໂພໂລຢີ NPC ຖືກນໍາໃຊ້ເປັນຂັ້ນຕອນຂອງ rectifier, ມັນບໍ່ຕ້ອງການລົດເມ DC ແຍກຕ່າງຫາກ, ເຊິ່ງຊ່ວຍຫຼຸດຜ່ອນຈໍານວນໝໍ້ແປງຂັ້ນຕອນການແຍກຕ່າງຫາກ. ຍິ່ງໄປກວ່ານັ້ນ, ໃນໂຄງສ້າງສາມເຟສ, ບໍ່ມີແຮງດັນຄວາມຖີ່ສອງສາຍໃນລົດເມ. ຢ່າງໃດກໍຕາມ, ເນື່ອງຈາກໂທໂພໂລຢີທີ່ຖືກໜີບຕ້ອງການອຸປະກອນໜີບຈໍານວນຫຼວງຫຼາຍ, ຈໍານວນອຸປະກອນໜີບຈະເພີ່ມຂຶ້ນເມື່ອຈໍານວນລະດັບເພີ່ມຂຶ້ນ, ເຮັດໃຫ້ການຂະຫຍາຍລະດັບມີຄວາມຫຍຸ້ງຍາກ ແລະ ການຊໍ້າຊ້ອນຍາກທີ່ຈະບັນລຸໄດ້. ໃນແງ່ຂອງການຄວບຄຸມ, ກະແສໄຟຟ້າທີ່ໄຫຼເຂົ້າໄປໃນແຕ່ລະຕົວເກັບປະຈຸລົດເມຂອງຕົວແປງ NPC ແມ່ນແຕກຕ່າງກັນ, ເຊິ່ງນໍາໄປສູ່ຄວາມບໍ່ສົມດຸນຂອງແຮງດັນຕົວເກັບປະຈຸ. ສໍາລັບໂທໂພໂລຢີ NPC ທີ່ສູງກວ່າສາມລະດັບ, ບໍ່ມີອັລກໍຣິທຶມການດຸ່ນດ່ຽງແຮງດັນທີ່ມີປະສິດທິພາບ. ນອກຈາກນັ້ນ, ເວລາປະຕິບັດງານທີ່ບໍ່ສອດຄ່ອງຂອງສະວິດພາຍໃນ ແລະ ພາຍນອກແຂນນໍາໄປສູ່ຄວາມຮ້ອນທີ່ບໍ່ສະເໝີພາບ, ເຊິ່ງສາມາດແກ້ໄຂໄດ້ໂດຍການປ່ຽນແປງໂທໂພໂລຢີວົງຈອນໂດຍລວມເທົ່ານັ້ນ.
ຄວາມຫຍຸ້ງຍາກຫຼາຍຢ່າງທີ່ເກີດຈາກການຂະຫຍາຍລະດັບໝາຍຄວາມວ່າໂທໂພໂລຢີ NPC ສາມາດນຳໃຊ້ໄດ້ໃນລະດັບແຮງດັນປານກາງ/ສູງຜ່ານການເຊື່ອມຕໍ່ຊຸດອຸປະກອນ ຫຼື ການໃຊ້ອຸປະກອນ SiC ແຮງດັນສູງເທົ່ານັ້ນ. ຢ່າງໃດກໍຕາມ, ໃນລະດັບແຮງດັນຕ່ຳກວ່າ, ເມື່ອທຽບກັບໂທໂພໂລຢີ H-bridge ດຽວ, NPC ສາມລະດັບມີຄວາມຕ້ານທານແຮງດັນ ແລະ ຄວາມກົດດັນແຮງດັນພຽງເຄິ່ງໜຶ່ງໃນແຕ່ລະທຣານຊິດເຕີສະວິດ, ໃນຂະນະທີ່ສົ່ງອອກລະດັບແຮງດັນຫຼາຍຂຶ້ນ, ເຊິ່ງເຮັດໃຫ້ຄວາມຕ້ອງການການກັ່ນຕອງຜົນຜະລິດຕ່ຳລົງ. ມັນມີຂໍ້ດີໃນການນຳໃຊ້ທີ່ສຳຄັນເປັນເວທີອິນເວີເຕີຢູ່ດ້ານແຮງດັນຕ່ຳຂອງ PET. ຕົວຢ່າງ, ເອກະສານໄດ້ໃຊ້ NPC ທີ່ມີໄດໂອດສາມລະດັບເປັນເວທີອິນເວີເຕີຂອງ PET ເພື່ອຂັບເຄື່ອນມໍເຕີສາມເຟດ, ດຳເນີນການກວດສອບການທົດລອງ ແລະ ບັນລຸປະສິດທິພາບການຂັບເຄື່ອນມໍເຕີ ແລະ ປະສິດທິພາບສຽງລົບກວນທີ່ດີ.