+86 18068001229
+86 18068001229 








0102030405
ການທົບທວນຄືນກ່ຽວກັບໂທໂພໂລຊີ ແລະ ການນຳໃຊ້ການຄວບຄຸມຂອງໝໍ້ແປງເອເລັກໂຕຣນິກພະລັງງານແຮງດັນກາງ-ສູງ II
2025-09-18
ການເລືອກໂຄງສ້າງໂດຍລວມ 2 PET
ໂຄງສ້າງ PET ແຕກຕ່າງກັນຢ່າງຫຼວງຫຼາຍ. ອີງຕາມຈຳນວນຂັ້ນຕອນການປ່ຽນພະລັງງານ, ພວກມັນສາມາດຈັດປະເພດເປັນປະເພດຂັ້ນຕອນດຽວ, ສອງຂັ້ນຕອນ, ແລະ ສາມຂັ້ນຕອນ [7]. ໂຄງສ້າງສອງຂັ້ນຕອນປະກອບມີໂຄງສ້າງທີ່ມີລົດເມ DC ແຮງດັນສູງ ແລະ ແຮງດັນຕ່ຳ, ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 1.
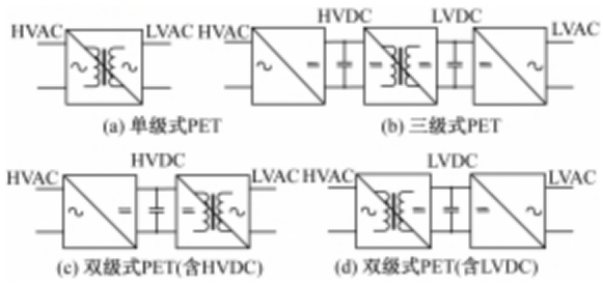
ໃນ PET ຂັ້ນຕອນດຽວ (ຮູບທີ 1(a)), ຄວາມຖີ່ກາງ/ສູງ ໝໍ້ແປງໄຟຟ້າແບບແຍກ ເຊື່ອມຕໍ່ຕົວແປງ AC/AC ທັງສອງດ້ານ. ຕົວແປງ AC/AC ດ້ານຫຼັກປັບແຮງດັນໄຟຟ້າ AC ຄວາມຖີ່ສາຍຂາເຂົ້າເປັນແຮງດັນໄຟຟ້າ AC ຄວາມຖີ່ສູງ, ເຊິ່ງຖືກເຊື່ອມຕໍ່ຜ່ານໝໍ້ແປງ ແລະ ຫຼັງຈາກນັ້ນປ່ຽນກັບຄືນສູ່ແຮງດັນໄຟຟ້າ AC ຄວາມຖີ່ສາຍໂດຍຕົວແປງ AC/AC ດ້ານຮອງ. PET ຂັ້ນຕອນດຽວມີຂັ້ນຕອນການປ່ຽນແປງໜ້ອຍກວ່າ ແລະ ອົງປະກອບໜ້ອຍກວ່າ, ປະສິດທິພາບສູງ, ແລະ ຄວາມໜາແໜ້ນຂອງພະລັງງານສູງ. ຢ່າງໃດກໍຕາມ, ການຂາດລົດເມ DC ເຮັດໃຫ້ພວກມັນບໍ່ເໝາະສົມກັບຕາຂ່າຍໄຟຟ້າ AC/DC ແບບປະສົມ, ແລະ ການຄວບຄຸມການແຍກພະລັງງານແມ່ນສັບສົນ.
PET ສອງຂັ້ນຕອນມີລົດເມ DC ຢູ່ດ້ານແຮງດັນສູງ ຫຼື ຕໍ່າ. ໂຄງສ້າງຢູ່ດ້ານໜຶ່ງຂອງໝໍ້ແປງໄຟຟ້າແບບໂດດດ່ຽວຄ້າຍຄືກັບ PET ຂັ້ນດຽວ, ໃນຂະນະທີ່ອີກດ້ານໜຶ່ງເຊື່ອມຕໍ່ກັບລົດເມ DC ຜ່ານວົງຈອນ AC/DC ຫຼື DC/AC (ຮູບທີ 1(c) ແລະ ຮູບທີ 1(d)). ດ້ວຍການເຊື່ອມຕໍ່ DC ແຮງດັນສູງ ຫຼື ຕໍ່າ, PET ສອງຂັ້ນຕອນສາມາດເຊື່ອມຕໍ່ກັບຕາຂ່າຍໄຟຟ້າ DC ແຮງດັນກາງ/ສູງຢູ່ດ້ານແຮງດັນສູງ ຫຼື ກັບລະບົບ PV/ເກັບຮັກສາຢູ່ດ້ານແຮງດັນຕໍ່າ. ຢ່າງໃດກໍຕາມ, ພະລັງງານທີ່ໃຊ້ງານທີ່ຖືກໂອນໂດຍຕົວແປງຢູ່ທັງສອງດ້ານຂອງໝໍ້ແປງໄຟຟ້າແບບໂດດດ່ຽວແມ່ນມີຄວາມອ່ອນໄຫວສູງຕໍ່ພາລາມິເຕີຄວາມໜ่วงเหนี่ยวຂອງການຮົ່ວໄຫຼຂອງໝໍ້ແປງໄຟຟ້າ. ນອກຈາກນັ້ນ, ຕົວເກັບປະຈຸລົດເມ DC ປະສົບກັບການປ່ຽນແປງຂອງແຮງດັນຄວາມຖີ່ສອງສາຍທີ່ສຳຄັນ, ແລະ ການປ່ຽນແປງຂອງກະແສໄຟຟ້າຂອງຕົວແປງໄຟຟ້າແມ່ນໃຫຍ່ [7], ເຮັດໃຫ້ການຄວບຄຸມມີຄວາມທ້າທາຍ.
PET ສາມຂັ້ນຕອນ (ຮູບທີ 1(b)) ມີລົດເມ DC ຢູ່ທັງສອງດ້ານແຮງດັນສູງ ແລະ ແຮງດັນຕ່ຳ. ກະແສໄຟຟ້າ AC ຄວາມຖີ່ສາຍປ້ອນຖືກແກ້ໄຂເປັນລົດເມ DC ແຮງດັນສູງຜ່ານການປ່ຽນ AC/DC, ດັດແປງເປັນຄື້ນສີ່ຫຼ່ຽມຄວາມຖີ່ສູງ, ເຊື່ອມຕໍ່ກັບດ້ານແຮງດັນຕ່ຳຜ່ານໝໍ້ແປງຄວາມຖີ່ກາງ/ສູງ, ແກ້ໄຂເປັນລົດເມ DC ແຮງດັນຕ່ຳ, ແລະສຸດທ້າຍປ່ຽນເປັນແຮງດັນ AC ຄວາມຖີ່ສາຍຜ່ານການປ່ຽນ DC/AC. PET ສາມຂັ້ນຕອນສາມາດເຊື່ອມຕໍ່ກັບທັງລະບົບ DC ແຮງດັນສູງ ແລະ ແຮງດັນຕ່ຳ. ການຄວບຄຸມແຕ່ລະຂັ້ນຕອນການປ່ຽນແປງແມ່ນຂ້ອນຂ້າງເປັນອິດສະຫຼະ, ອຳນວຍຄວາມສະດວກໃນການແຍກຕົວ ແລະ ການຄວບຄຸມການຊົດເຊີຍ. ຢ່າງໃດກໍຕາມ, ຂັ້ນຕອນການປ່ຽນແປງຫຼາຍຂັ້ນຕອນເຮັດໃຫ້ມີໂຄງສ້າງທີ່ສັບສົນທີ່ສຸດ. ເນື່ອງຈາກການອອກແບບຫຼາຍຂັ້ນຕອນ, ໂທໂພໂລຊີ PET ສາມຂັ້ນຕອນສາມາດບັນລຸການຕໍ່ກັນໄດ້ງ່າຍຂຶ້ນໃນດ້ານແຮງດັນສູງ ແລະ ຂະໜານກັນໃນດ້ານແຮງດັນຕ່ຳ, ຕອບສະໜອງຄວາມຕ້ອງການການນຳໃຊ້ແຮງດັນກາງ/ສູງ. ດັ່ງນັ້ນ, ໂທໂພໂລຊີສາມຂັ້ນຕອນແມ່ນການນຳໃຊ້ຢ່າງກວ້າງຂວາງທີ່ສຸດໃນການຄົ້ນຄວ້າ ແລະ ການນຳໃຊ້ PET ແຮງດັນກາງ/ສູງ.
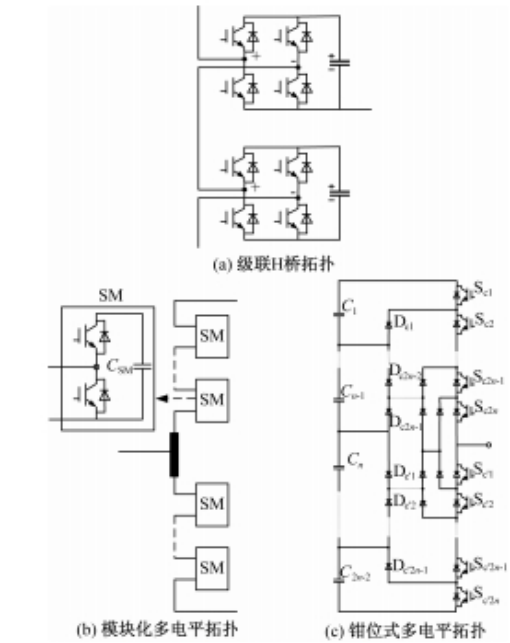
ສຳລັບ PET ໃນການນຳໃຊ້ແຮງດັນປານກາງ/ສູງ, ດ້ານແຮງດັນຕ່ຳມີລະດັບແຮງດັນຕ່ຳໂດຍມີຂໍ້ຈຳກັດດ້ານແຮງດັນຂອງອຸປະກອນໜ້ອຍທີ່ສຸດ. ໃນທາງກົງກັນຂ້າມ, ຂັ້ນຕອນການແກ້ໄຂແຮງດັນສູງ ແລະ ຂັ້ນຕອນການແຍກຕົວລະດັບກາງປະເຊີນກັບລະດັບແຮງດັນສູງ, ເຊິ່ງເຮັດໃຫ້ມີຄວາມຕ້ອງການທີ່ເຂັ້ມງວດກວ່າຕໍ່ໂທໂພໂລຢີຂອງວົງຈອນ ແລະ ອຸປະກອນຕ່າງໆ. ການຄົ້ນຄວ້າທີ່ມີຢູ່ແມ່ນສຸມໃສ່ສອງທິດທາງຄື: ① ໂທໂພໂລຢີໃໝ່ ແລະ ວິທີການຄວບຄຸມສຳລັບ PET ແຮງດັນປານກາງ/ສູງໂດຍອີງໃສ່ການຈັດອັນດັບແຮງດັນຂອງອຸປະກອນທີ່ມີຢູ່; ② ໂທໂພໂລຢີ ແລະ ການຄວບຄຸມ PET ໂດຍໃຊ້ອຸປະກອນແຮງດັນສູງໃໝ່, ເຊັ່ນ: ອຸປະກອນ SiC 10kV [8, 9]. ຢ່າງໃດກໍຕາມ, ອຸປະກອນ SiC ແຮງດັນສູງຍັງຢູ່ໃນໄລຍະການຄົ້ນຄວ້າ ແລະ ພັດທະນາໃນຫ້ອງທົດລອງ, ແລະ ອຸປະກອນການຄ້າຍັງບໍ່ສາມາດຕອບສະໜອງຄວາມຕ້ອງການດ້ານແຮງດັນໄດ້. ດັ່ງນັ້ນ, ໂທໂພໂລຢີຫຼາຍໂມດູນແບບ cascades ຫຼື ໂທໂພໂລຢີຫຼາຍລະດັບໂມດູນດຽວແມ່ນໃຊ້ເພື່ອຕອບສະໜອງຄວາມຕ້ອງການດ້ານແຮງດັນຂາເຂົ້າສູງ. ໂທໂພໂລຢີທົ່ວໄປແມ່ນສະແດງຢູ່ໃນຮູບທີ 2, ເຊິ່ງວິເຄາະໃນພາກທີ 3.