
 +86 18068001229
+86 18068001229 








0102030405
ການກວດສອບການຜິດຮູບຂອງຂົດລວດໝໍ້ແປງໄຟຟ້າແຮງສູງ ສະເພາະດ້ານເຕັກນິກ
2026-01-20
ວິທີແກ້ໄຂໝໍ້ແປງໄຟຟ້າ JZP
- ບົດນໍາ
ການຜິດຮູບຂອງຂົດລວດໃນລະດັບສູງໝໍ້ແປງໄຟຟ້າແຮງດັນ ເປັນຄວາມກັງວົນດ້ານຄວາມປອດໄພທີ່ສຳຄັນ, ເຊິ່ງມັກຈະເກີດຈາກຄວາມກົດດັນທາງກົນຈັກ, ວົງຈອນຄວາມຮ້ອນ, ຫຼື ຜົນກະທົບຈາກການລັດວົງຈອນ. ໃນຖານະຜູ້ນຳໃນການຜະລິດໝໍ້ແປງ, JZP ຍຶດໝັ້ນມາດຕະຖານ DL/T 1093-2018 ສຳລັບວິທີການປະຕິກິລິຍາໃນການກວດຈັບການຜິດຮູບຂອງຂົດລວດ ແລະ ປະສົມປະສານເຕັກໂນໂລຢີທີ່ກ້າວໜ້າເພື່ອຮັບປະກັນຄວາມສອດຄ່ອງ ແລະ ຄວາມໜ້າເຊື່ອຖື. ເອກະສານນີ້ລະບຸລາຍລະອຽດດ້ານເຕັກນິກຂອງ JZP ສຳລັບການກວດຈັບການຜິດຮູບຂອງຂົດລວດ, ເຊິ່ງກວມເອົາວິທີການ, ຄວາມຕ້ອງການອຸປະກອນ, ແລະ ຂັ້ນຕອນການດຳເນີນງານ.
- ຂອບເຂດ
ສະເພາະນີ້ໃຊ້ໄດ້ກັບ:
ຊ່ວງແຮງດັນ: 35 kV ແລະສູງກວ່າ.
ປະເພດໝໍ້ແປງ: ສາມເຟສ ແລະ ເຟສດຽວ ໝໍ້ແປງໄຟຟ້າ ດ້ວຍການຕັ້ງຄ່າຂົດລວດທີ່ເປັນຈຸດສູນກາງ.
ສະຖານະການກວດຈັບ: ການຍອມຮັບຈາກໂຮງງານ, ການກວດກາຫຼັງການຂົນສົ່ງ, ແລະ ການປະເມີນເຫດການຫຼັງການລັດວົງຈອນ.
- ວິທີການກວດສອບກຸນແຈ
3.1 ວິທີການປະຕິກິລິຍາ (ການປະຕິບັດຕາມ DL/T 1093-2018)
ຫຼັກການ: ວັດແທກການປ່ຽນແປງຂອງປະຕິກິລິຍາຂອງຂົດລວດ (ຄວາມຕ້ານທານ) ພາຍໃຕ້ແຮງດັນໄຟຟ້າ AC ເພື່ອກວດຫາການບິດເບືອນທາງກົນຈັກ.
ພາລາມິເຕີຫຼັກ:
ຊ່ວງຄວາມຖີ່: 10 Hz – 1 MHz.
ຄວາມຖືກຕ້ອງ: ±0.5% ສຳລັບຄ່າຄວາມຕ້ານທານ.
ແຮງດັນທົດສອບ: ≤2 kV (AC).
ຂໍ້ດີ: ມີຄວາມອ່ອນໄຫວສູງຕໍ່ການຜິດຮູບເລັກນ້ອຍ (ເຊັ່ນ: ຄວາມບ່ຽງເບນຄວາມຕ້ານທານ 0.1% ຊີ້ບອກເຖິງບັນຫາທີ່ອາດເກີດຂຶ້ນ).
3.2 ການວິເຄາະການຕອບສະໜອງຄວາມຖີ່ (FRA)
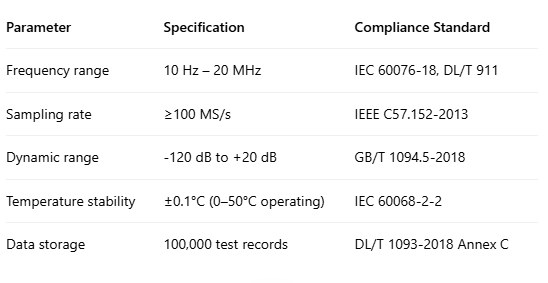
ວິທີການ: ກວາດຄວາມຖີ່ຈາກ 10 Hz ຫາ 20 MHz ເພື່ອຈັບເອົາຄຸນລັກສະນະການສະທ້ອນຂອງຂົດລວດ.
ການປັບປຸງຂອງ JZP:
ການເກັບຕົວຢ່າງທີ່ມີຄວາມລະອຽດສູງ: ຈຸດຂໍ້ມູນ 50,000 ຈຸດ ສຳລັບການວິເຄາະຮູບແບບຄື້ນທີ່ຊັດເຈນ.
ການອອກແບບຕ້ານການແຊກແຊງ: ການແຍກແສງ ແລະ ການປ້ອງກັນເພື່ອຫຼຸດຜ່ອນສິ່ງລົບກວນທາງແມ່ເຫຼັກໄຟຟ້າ.
ຜົນໄດ້ຮັບ: ການວິເຄາະປຽບທຽບຂອງສະເປກຕຣຳຄວາມຖີ່ໃນອະດີດ ທຽບກັບ ປະຈຸບັນ ເພື່ອລະບຸການປ່ຽນແປງຂອງຈຸດສູງສຸດຂອງການສະທ້ອນ (ເຊັ່ນ: ການປ່ຽນແປງ >3 dB ກະຕຸ້ນການແຈ້ງເຕືອນ).
- ຄວາມຕ້ອງການດ້ານເຕັກນິກ
- ຂັ້ນຕອນການທົດສອບ
5.1 ການກຽມຕົວກ່ອນການທົດສອບ
ການກວດສອບອຸປະກອນ: ກວດສອບການປັບທຽບເຊັນເຊີ (ຕົວຢ່າງ, ຂົດລວດ Rogowski ສຳລັບສັນຍານຄວາມຖີ່ສູງ).
ສະຖານະຂອງໝໍ້ແປງ: ໃຫ້ແນ່ໃຈວ່າໝໍ້ແປງຖືກຕັດພະລັງງານ ແລະ ໄດ້ຕໍ່ສາຍດິນແລ້ວ.
5.2 ການປະຕິບັດການທົດສອບ
ການຕັ້ງຄ່າສາຍໄຟ:
ຂົດລວດປະຖົມ: ໃຊ້ສັນຍານທົດສອບ (ຕົວຢ່າງ, ແຮງດັນໄຟຟ້າຊົ່ວຄາວຈາກການເປີດເບຣກເກີ).
ຂົດລວດທຸຕິຍະພູມ: ເຊື່ອມຕໍ່ເຊັນເຊີເພື່ອວັດແທກສັນຍານທີ່ຖືກກະຕຸ້ນ.
ການຕັ້ງຄ່າພາລາມິເຕີ:
ຂັ້ນຕອນການສະແກນຄວາມຖີ່: ການແຈກຢາຍໂລກາລິດເພື່ອການຄຸ້ມຄອງທີ່ຄົບຖ້ວນ.
ຂອບເຂດການກະຕຸ້ນ: ປັບອັດຕະໂນມັດໂດຍອີງໃສ່ຄວາມຈຸຂອງໝໍ້ແປງ (ເຊັ່ນ, ໝໍ້ແປງ 110 kV ຕ້ອງການຄວາມອ່ອນໄຫວ 100×).
ການໄດ້ມາຂອງຂໍ້ມູນ:
ບັນທຶກຕົວຢ່າງໄດ້ຫຼາຍກວ່າ 200 ຕົວຢ່າງຕໍ່ຈຸດຄວາມຖີ່.
ການສະແດງຜົນໃນເວລາຈິງຂອງຂະໜາດຄວາມຕ້ານທານ/ມຸມເຟສ.
5.3 ການວິເຄາະຫຼັງການທົດສອບ
ການວິນິດໄສອັດຕະໂນມັດ:
ປຽບທຽບກັບເສັ້ນຖານຂອງໂຮງງານ (ຕົວຢ່າງ, ຄ່າຜັນຄວາມຕ້ານທານ >2% ສະແດງເຖິງການຜິດຮູບ).
ການສ້າງແຜນທີ່ 3D ຂອງການແຈກຢາຍຄວາມກົດດັນຂອງການຂົດລວດ.
ການລາຍງານ: ສ້າງລາຍງານການປະຕິບັດຕາມກົດລະບຽບພ້ອມດ້ວຍກຣາຟ ແລະ ຄຳແນະນຳທີ່ສາມາດປະຕິບັດໄດ້.
- ການສຶກສາກໍລະນີ: ໝໍ້ແປງໄຟຟ້າຈາກຟາມກັງຫັນລົມ
ສະຖານະການ: ໝໍ້ແປງໄຟຟ້າຈາກຟາມກັງຫັນລົມ 33 kV ສະແດງໃຫ້ເຫັນເຖິງຄວາມຜັນຜວນຂອງຄວາມຕ້ານທານ 15% ຫຼັງຈາກເກີດພະຍຸ.
ວິທີແກ້ໄຂຂອງ JZP:
ດຳເນີນການທົດສອບ FRA, ເປີດເຜີຍການປ່ຽນຈຸດສູງສຸດຂອງສຽງສະທ້ອນ 4 kHz.
ລະບຸການຍ້າຍຂອງຂົດລວດບາງສ່ວນຜ່ານການຖ່າຍພາບຄວາມຮ້ອນແບບ 3D.
ແນະນຳໃຫ້ຖອຍຫຼັງ, ປ້ອງກັນຄວາມລົ້ມເຫຼວທີ່ຮ້າຍແຮງທີ່ອາດເກີດຂຶ້ນ.
- ການປະຕິບັດຕາມ ແລະ ການຮັບຮອງ
ມາດຕະຖານສາກົນ: IEC 60076-18, IEEE C57.152.
ໃບຢັ້ງຢືນ: CE, UL, ISO 9001.
ການຢັ້ງຢືນຂອງພາກສ່ວນທີສາມ: ການກວດສອບປະຈຳປີໂດຍ TÜV Rheinland.
- ສະຫຼຸບ
ລະບົບກວດຈັບການຜິດຮູບຂອງຂົດລວດຂອງ JZP ລວມເອົາການວັດແທກຄວາມແມ່ນຍໍາ, ການວິເຄາະທີ່ຂັບເຄື່ອນດ້ວຍ AI, ແລະ ການປະຕິບັດຕາມ DL/T 1093-2018 ຢ່າງເຕັມທີ່. ໂດຍການລວມເອົາເຕັກໂນໂລຢີທີ່ທັນສະໄໝເຊັ່ນ: FRA ຄວາມຖີ່ສູງ ແລະ ການລາຍງານອັດຕະໂນມັດ, ພວກເຮົາຮັບປະກັນວ່າໝໍ້ແປງໄຟຟ້າຈະເຮັດວຽກຢ່າງປອດໄພ ແລະ ມີປະສິດທິພາບໃນທົ່ວໂຄງການທົ່ວໂລກ.